2019년 3월 14일
CAN (Controller Area Network) 프로토콜
I. 차량 내부 통신 규약, CAN 프로토콜
가. CAN (Controller Area Network) 프로토콜의 개념
- 차량 내부 ECU간 IVN 통신을 위해 CSMA/CD 방식 전위 차 기반 Serial Bus 통신 프로토콜
나. CAN의 통신 유형
| 표준 CAN(2.0A) | – ISO/IEC 11519, 125Kbps 저속 통신 – 차량 내 편의 기능 (도어, 시트 조정) |
| 확장 CAN(2.0B) | – ISO/IEC 11898, 1Mbps 이상 고속 통신 – 차량 안전 기능 (엔진, 변속기 통신) |
- CAN 메시지 내 식별자에 따라 2가지 모드(고속, 저속) 제공
II. CAN 통신 원리 및 프레임 구성도/구성요소
가. CAN의 통신 원리
| CSMA/CD 방식 통신 | 전위 차 기반 전송 |
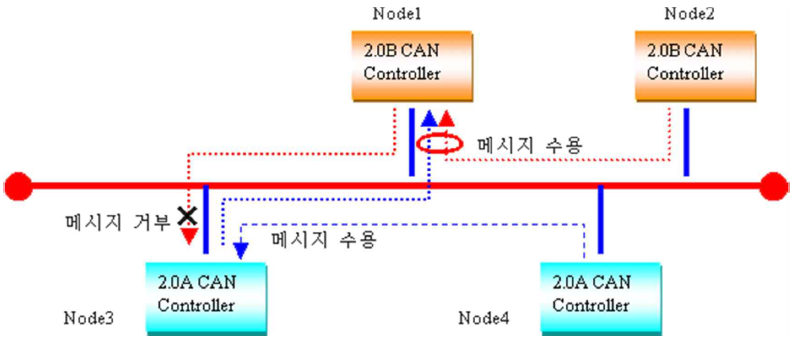 |  |
| – BUS 내 혼잡 여부 감시 – 혼잡 시 우선순위기반 통신 – 필요 메시지 식별자 수신 – 불필요 메시지 식별자 무시 | – CAN_H, CAN_L Twist Pair – 두 가닥 전위 차 Data 전송 – 전위차 2V 시 ‘0’ 전달 – 전위차 0V 시 ‘1’ 전달 |
나. CAN 프레임 구성도/구성요소
| 프레임 구성도 | 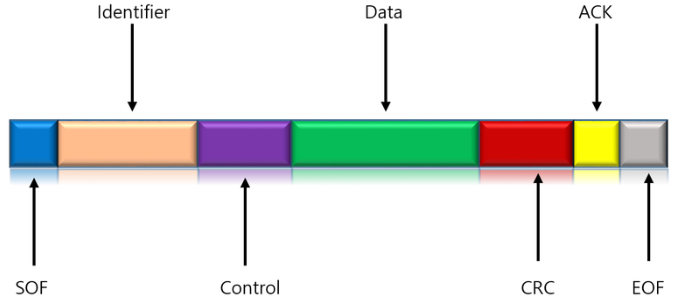 | |
| 구성 요소 | SOF | – Start of Frame. 노드 간 동기화 |
| Identifier | – 표준 CAN(11bit), 확장 CAN(29bit) | |
| Control | – 데이터의 길이(Data Length Code) | |
| Data | – 전달 메시지 데이터 | |
| CRC | – 프레임 송신 오류 검출 사용 | |
| ACK | – 수신확인 및 오류 검사 확인 비트 | |
| EOF | – End of Frame. 프레임 종료 의미 | |
- 스마트카 기반 기술 구현을 위한 IVN 통신 기술
III. 스마트카 구현을 위한 IVN 기술 간 비교
 |
- 차량 내부 통신 필요량 증가에 따른 대역폭 및 보안 위협 대응 필요