2019년 3월 20일
LiDAR (Light Detection and Ranging)
I. 레이저 기반 사물 인지, LiDAR
가. LiDAR(Light Detection and Ranging)의 개념
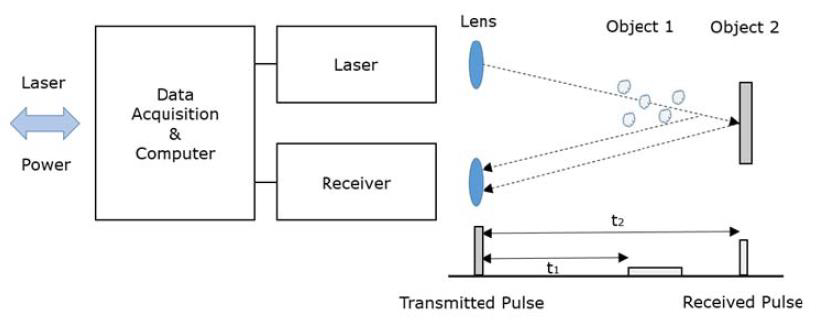
- 사물 거리 정보 획득을 위해 물체에서 반사된 고출력 레이저 빔의 시간 측정기반 사물 탐지 기술
나. LiDAR 사용 목적
- 3D Reverse Engineering, 자율주행 및 무인자동차를 위한 레이저 스캐너, 3D영상 카메라의 핵심기술
II. LiDAR의 사물 탐지 기술 및 기술 유형
가. LiDAR의 사물 탐지 기술/구성요소
 | |
| 구성요소 | 설명 |
|---|---|
| Source | – 광학계(Lens)로부터 균일한 레이저 빔을 발광 – Laser Diode, illumination Board, 광학계 |
| Optics | – Source, Detector 간 시야 각 및 해상도 확보 – 광학 렌즈, 거울, 프리즘 등으로 구성 |
| Detector | – 반사되어 돌아오는 레이저 점 군 인식 – Photodiode Array, 집광부, 신호처리부, 제어부 |
나. LiDAR 기술 유형
| 구분 | 기술 유형 | 설명 |
|---|---|---|
| 변조 방식 | TOF(Time of Flight) 방식 | – 레이저 펄스가 물체에 반사되어 수신기에 도착하는 시간 측정 |
| PS(Phase Shift) 방식 | – 특정 주파수 레이저가 물체에 반사되는 신호 위상 변화 측정 | |
| 구성 방식 | 회전형 | – 360도 회전체 내 레이저 탑재 – 몸체회전형, 거울회전형 |
| 어레이형 | – 수광부 픽셀을 다수 배치하여 3차원 고해상도 영상 습득 | |
| STUD 방식 | – Static Unitary Detector, 고정형 – 320 x 240 픽셀 3차원 영상획득 | |
| 동작 방식 | Elastic-backscatter LiDAR | – 입자 운동량에 따른 산점 특성 – 대기중 aerosol, 구름 특성 측정 |
| Raman LiDAR | – 분자 에너지 따른 주파수변화 – 대기중 수증기, 온도분포 측정 | |
| DIAL | – 각 레이저 파장 별 흡수 차이 – 대기 오염 물질 농도 분포 측정 | |
| Resonance Fluorescence LiDAR | – 긴 파장 빛 방출 특성 이용 – 대기중 원자 및 이온 농도 측정 | |
| Doppler LiDAR | – 레이저 빔 미세한 주파수 변화 – 바람 등 속도 측정 기술 | |
| Laser Rangerfinder | – 물체로부터 반사되는 수신시간 – 거리 측정 가장 간단한 형태 | |
| Imaging LiDAR | – 거리정보 포함 공간영상 모델링 – 3차원 영상 구현 기술 |
III. LiDAR 기술 적용 대상
| 분야 | 적용 대상 | 설명 |
|---|---|---|
| 산업 분야 | 자동차 | – 자율주행 자동차, 무인자동차 |
| 우주 | – 우주선 도킹시스템, 행성 탐사 | |
| 항공 | – 드론, 환경 관측, 산불 감시 | |
| 건축 | – 정밀 지형정보, 건물 상태 조사 | |
| 공공 분야 | 측량 | – 3D GIS, 건물 측량, 지형 고도 |
| 재난 예측 | – 산불, 홍수, 지진 사전 예측 | |
| 기상 측정 | – 대기 오염, 미세먼지, 방사능 오염 | |
| 군사 정보 | – 원거리 사물 인식, 야간 작전 수행 |