2019년 3월 20일
컴퓨터 비전 (Computer Vision)
I. 실시간 영상 인식, 컴퓨터 비전
- 입력된 영상을 분할, 특징 추출, 매칭 등 영상 처리기술을 통해 사물을 분류하는 영상 인식 기술
II. 컴퓨터 비전의 절차도 및 주요 기술
가. 컴퓨터 비전의 절차도
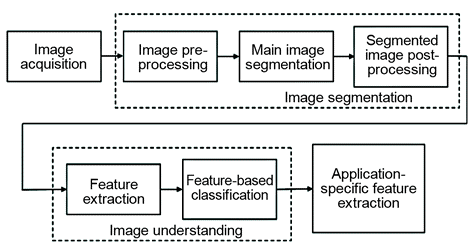 |
- 이미지 분할과 특징 추출을 통한 이미지 인식 절차 수행
나. 컴퓨터 비전의 주요 기술
| 구분 | 주요 기술 | 설명 |
|---|---|---|
| 에지 검출 | 영 교차 이론 | – 2차 미분 기반 임의 에지 검출 – 영교차로 잡음 증폭, 스무딩 적용 |
| 캐니 에지 | – 최소 오류율, 위치 정확도 – 단일 에지 응답 | |
| 영상 분할 | 민 시프트 | – 특정 데이터 분포 군집화 알고리즘 – 임의 영상을 몇 개 영역으로 분할 |
| 최소 신장 트리 | – 에지 가중치 거리인 그래프 표현 – 신장 트리 기반 최적노드(화소) 탐색 | |
| 워터 셰드 | – 빗물이 안쪽/바깥쪽 중 흐르는 원리 – 적용 후 명확한 경계로 분류 | |
| 특징 추출 | 전역 기술자 | – 일정 패턴이 반복되는 텍스처 특징 – 동일 패턴 반복 영상 구별 불가 |
| 지역관계 기술자 | – 화소 사이 이웃관계를 규정 – 화소들이 형성하는 패턴 표현 | |
| 주성분 분석 | – 사물의 주요 특징 분석 및 추출 – 축 상의 투영으로 표현, 저차원 축소 | |
| 매칭 | 최근접 이웃탐색 | – 거리우선, 백트래킹, 최적칸 탐색 – 가까운 두 벡터는 같은 해시값 |
| 기하 정렬/변환 | – 신뢰도 높은 매칭 쌍 선택방법 – 최소 제곱법, 강인한 추정, RANSAC | |
| 추정 | – 최소 제곱법, 강인한 추정, RANSAC – 임의 대응점 기반 최대 컨센서스형성 |
- 현재 컴퓨터 비전 기술은 날씨와 주변 상황에 따라 인식률에 차이가 발생하는 한계점 존재
III. 컴퓨터비전의 한계점 및 고려사항
| 한계점 | 고려사항 |
|---|---|
| – 빛, 날씨 등 인식률 차이 – 무게 등 웨어러블 한계 – 저장된 영상 외 인식불가 | – 전용 시스템으로 개발/활용 – 초박막 배터리 + 에너지수집 – 전이 학습 기반 분류 학습 |
- 한계점 극복으로 다양한 영상 인식 기반 스마트카, CCTV, AR 기술 등 다양한 활용 가능